Dicas de Hardware
Eletrônica
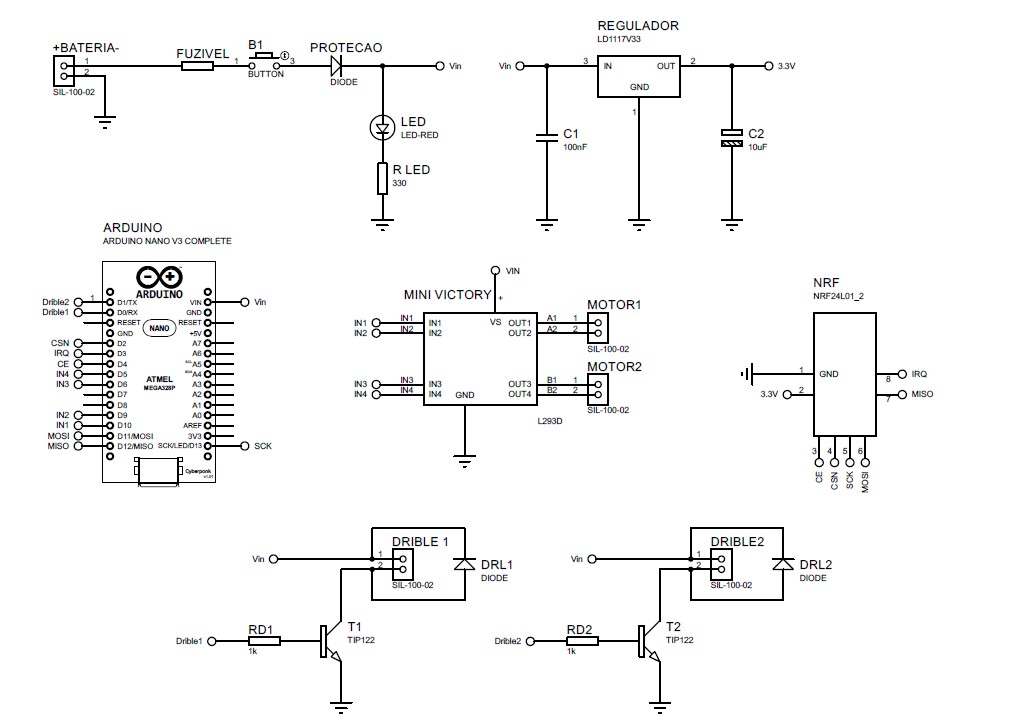
O hardware eletrônico utilizado nos robôs do VSSS é simples. Os motores precisam ser pequenos, devido ao espaço e podem conter sensores funcionando como tacômetros ou não. O controle pode ser feito por microcontroladores populares como Arduino ou PIC. Além disso será necessário uma Ponte-H para controle dos motores como uma Mini Victory que utiliza um L298N.
Além disso, para a comunicação pode usar um módulo Xbee ou um rádio como o nRF24L01+, ambos possuem bibliotecas para Arduino. Já a alimentação requer uma bateria pequena podendo ser uma LiPo ou uma Ni-Cd. Atenção: elas podem explodir. Também recomendamos um circuito regulador de tensão simples e adicionar uma proteção para baterias usando diodos, bem como um botão liga-desliga. Se você quiser deixar bem seguro, pode adicionar um pequeno fusível.
Mecânica
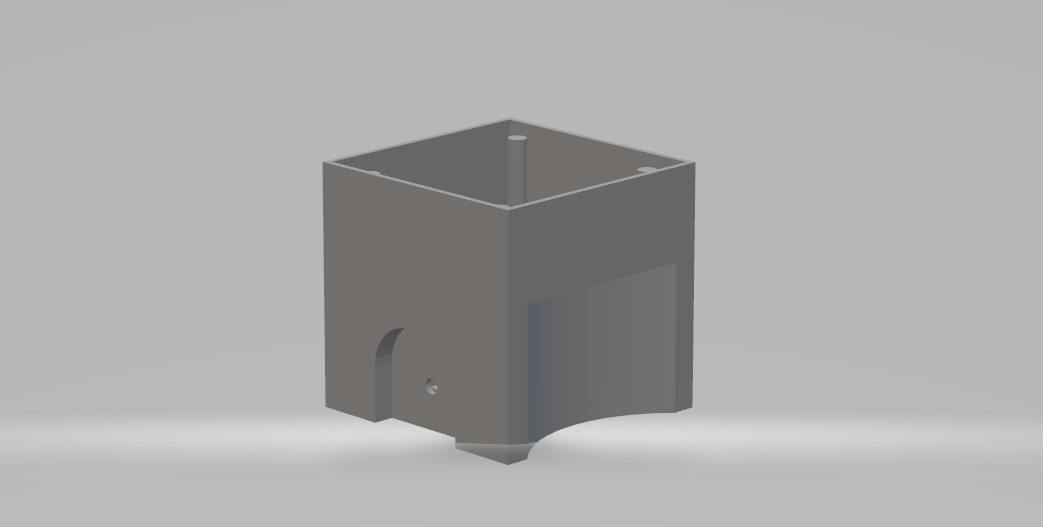
Este é um projeto de robô de fácil manutenção, construção e de baixo custo. Por isso, foram utilizados materiais plásticos, impressora 3D, rodas e motores facilmente encontrados no mercado. A estrutura foi projetada para impressora 3D, com o material ABS, por sua maior durabilidade, já que colisões são comuns durante a partida. A estrutura possui duas áreas de drible que também fornecem apoio para os componentes eletrônicos.
A roda utilizada é a Pololu 32x7mm, sendo um tamanho suficiente para caber a bateria e os outros componentes eletrônicos na parte superior do robô. A roda já possui anéis de borracha que conferem mais atrito com a superfície, evitando deslizamentos. Os motores são dois N20 com caixa de redução (gearmotors). A velocidade indicada para esses motores é de 400 rmp, para que haja torque suficiente para vencer disputas de bola. A redução adequada para o peso e estrutura do robô é de 75:1. O Consumo médio é bem pequeno, ficando em aproximadamente 1 Ampere de pico, sendo alimentado por 6V. A imagem mostra uma base para o vss, em stl.